Steven van Leeuwen
svanlee@umich.edu
I’m Steven van Leeuwen, you have landed on my project page. My interests, broadly speaking, are in control design of maneuvering vehicles. More specifically, I enjoy formulating control laws for input and output constrained systems. Within this context I enjoy using optimization techniques and addressing real-time implementation. I have worked on wheeled, drone, and spacecraft platforms, and am currently interested in those with an aerospace flavor.
Research and Projects
Spacecraft Near Asteroid Optimal Control
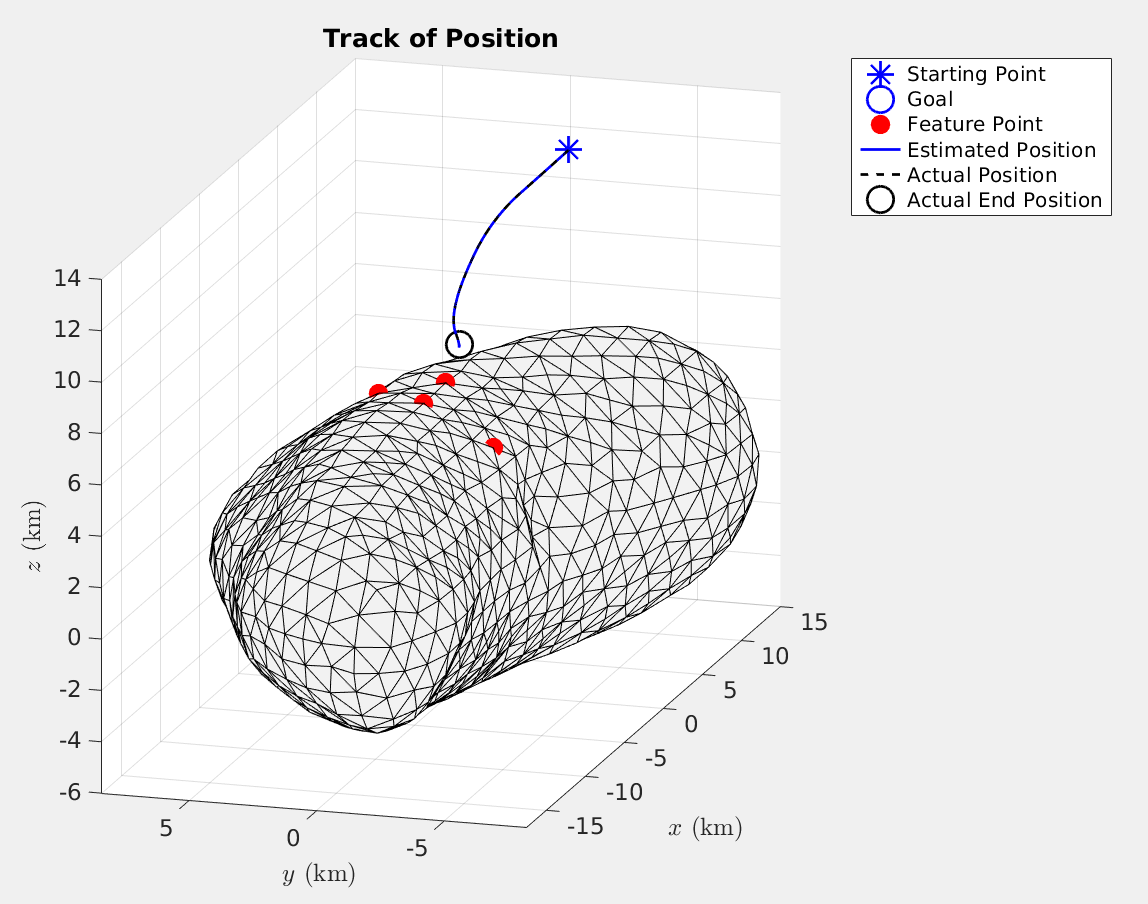
Control of spacecraft descent and landing on an orbiting asteroid surface. The focus of this work is using MPC and convexification approaches to control nonlinear stochastic dynamic systems and formulating this with estimation. Creation of a measurement model fusing imu, strapped-down optical camera capturing surface feature markers, and lidar sensors. Simulation consisiting of 6dof plant model and EKF. Exploration of reference modulators/governors and stochastic MPC, including chance-based constraints, in the controller scheme design. Examples of important constraints for this asteroid/spacecraft scenario are soft landing and field of view constraints. I have also worked on this asteroid/spacecraft scenario in a collaboration with a focus on NMPC and quaternions. Links to the non-NMPC work: Code
Reachability-Based Trajectory Design
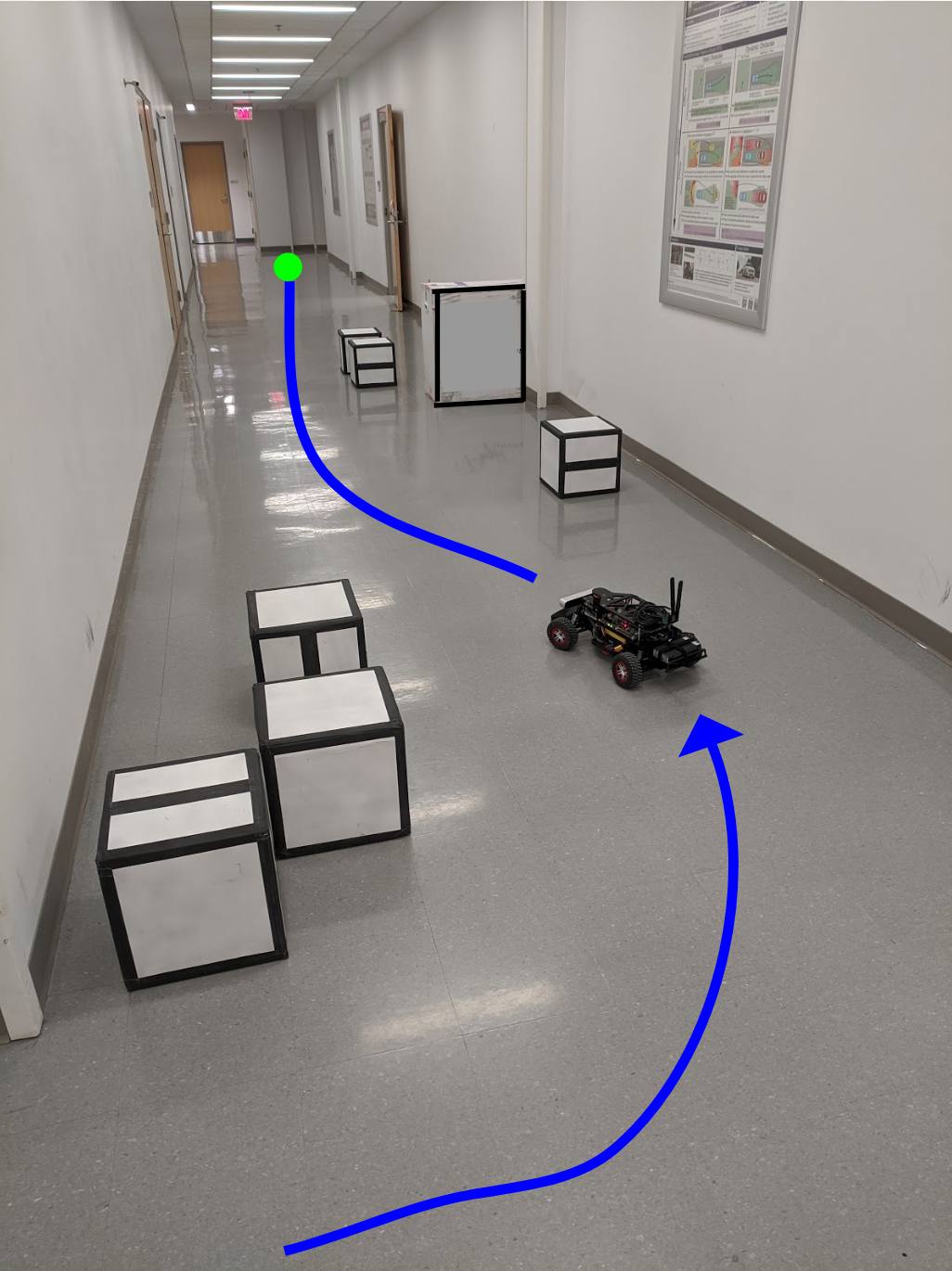
Additional developments of a trajectory planning and control technique with safety guarantees known as Reachability-Based Trajectory Design. Implementation on a 1:10 scale RC car, including low level controller design, SLAM, and high level path planning in the online pipeline. Processing of obstacles in the environment as constraints in optimization. Investigation of numerical techniques to make online performance faster, along with software tuning for the hardware. Code
"The Intelligent Arm" Robot
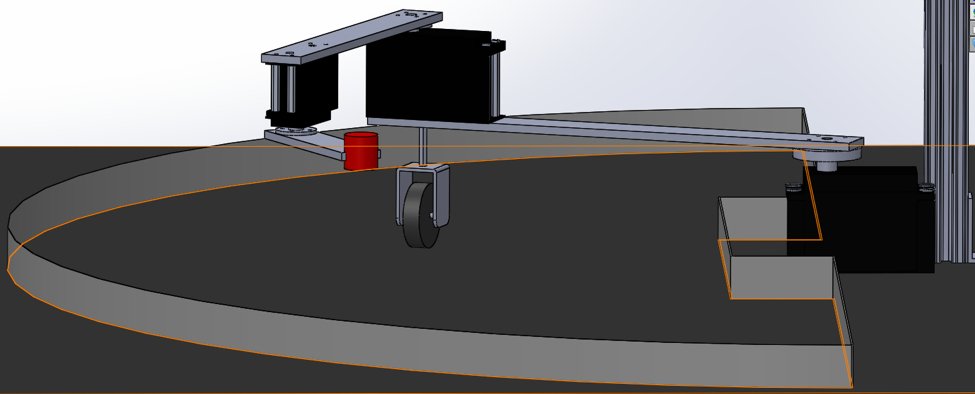
Three-linkage mechanical arm with camera object tracking. The product was brought from conception to a working demo. Featured proportional feedback control. Website
Berkeley Autonomous Race Car (BARC)
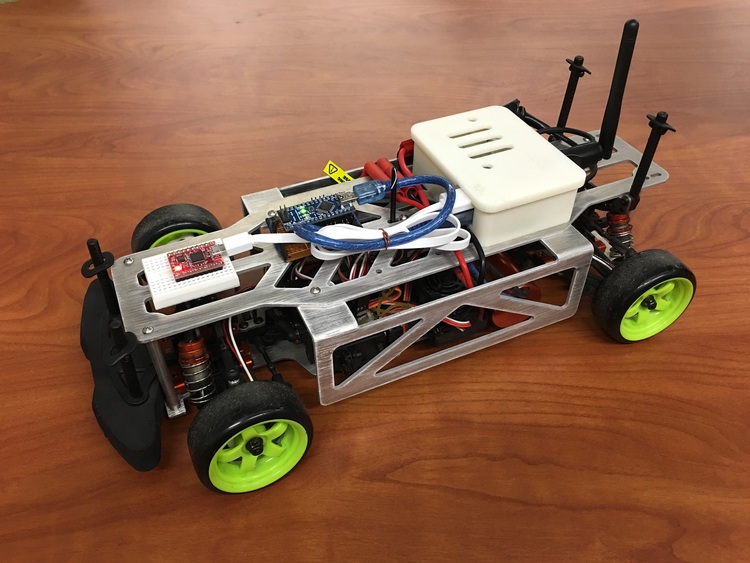
1:10 scale RC car modification for autonomous driving. Codeveloped prototype vehicle- body assemblies, software code for actuators, IMU filtering, tire force model, documentation.
Comparison of Different Steering Control Strategies on Highway
Development and comparison of a Sliding Mode and MPC controller for vehicle lane keeping and
obstacle avoidance maneuvering in simulation while enrolled in honors undergraduate research.
Mobile Gates for Congested Airports
Researched mobile gate design concept to improve airport efficiency with professor-led team. Devised movable and detachable jet bridge connections to terminal building. Project award in nationwide competition. Award Announcement
Publications
Conference Proceeding
S. van Leeuwen, “A Chance Constraint Predictive Control and Estimation Framework for Spacecraft Descent with Field
of View Constraints” AIAA 2021-1219 AIAA Scitech 2021 Forum. 2021
S. van Leeuwen, T. Skibik, M. Nicotra, I. Kolmanovsky, and D. Liao-McPherson “A Nonlinear Predictive Control Strategy for Landing on an Asteroid” 2022 American Control Conference (ACC). Atlanta, GA, USA, 2022, pp. 443-449
S. van Leeuwen, and I. Kolmanovsky, “A Computation Governor for ADMM-based MPC with Constraint Satisfaction and Setpoint Tracking” 2024 American Control Conference (ACC). Toronto, ON, CA, 2024, pp. 4967–4973